



(Revista Defensa nº 22, febrero 1980) A finales de 1979 se efectuó en los astilleros de Italcantieri (La Spezia) la botadura del submarino de ataque Leonardo da Vinci (S-521). El Vinci es el último de una serie de cuatro submarinos de la clase Nazario Sauro que entró en servicio con la Marina Militare Italiana hacia 1981.
Los nombres y numerales de los submarinos de esta clase son:
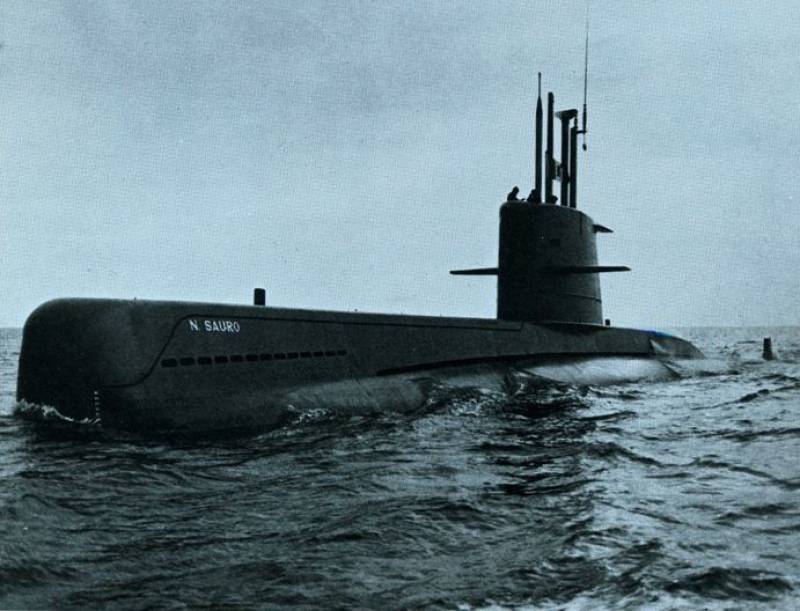
Nazario Sauro (S-518).
Feccia di Cossato (S-519).
Guglielmo Marconi (S-520).
Leonardo da Vinci (S-521).
Los Sauro, gracias a lo racional de su diseño y al alto nivel técnico alcanzado por la industria naval italiana, están en condiciones de competir con cualquier otro submarino producido en Occidente (salvo los nucleares, por supuesto). Existe una versión de exportación prácticamente idéntica, denominada Tipo 1076 y una versión costera encogida denominada Tipo 1077, que para un desplazamiento de tan sólo 554 Tm. presenta unas características notables.
ORIGEN Y CONCEPCIÓN
Los Sauro son el segundo modelo de submarino construido en Italia después de la SGM. El modelo anterior, cuya concepción ha sido fundamental como experiencia para el posterior desarrollo de los Sauro, estuvo también integrado por cuatro unidades, conocidas como clase Toti: (S-505, 506, 513 y 514). Sin embargo, estos submarinos correspondían a una base completamente distinta, ya que estaban diseñados para operar cerca de la costa y en aguas poco profundas, siendo su misión principal la defensa de la costa nacional contra incursiones submarinas y de superficie por parte del enemigo.
Por el contrario, el diseño de los Sauro corresponde a la idea que actualmente se tiene en Occidente de lo que ha de ser un SSK. Es decir, un submarino destinado a cumplir las siguientes misiones:
Interdicción lejana contra fuerzas navales enemigas destinadas a lanzar ataques contra un territorio nacional aliado.
Protección de las unidades navales y mercantes propias o aliadas contra la acción de los submarinos enemigos.
Ataques y emboscadas contra buques de guerra enemigos en mar abierta o en la proximidad de sus bases.
Secundariamente, ataques contra el tráfico mercante enemigo. Este tipo de misiones imponen la necesidad de disponer de un submarino de tipo oceánico, cuyas características se pueden resumir:
Alta velocidad en inmersión, en orden a posibilitar la acción contra veloces unidades enemigas.
Navegación muy silenciosa, gran cota de profundidad y tamaño reducido para evitar la detección por parte del enemigo.
Gran autonomía en inmersión para reducir al mínimo la navegación en superficie en aguas hostiles.
Buena maniobrabilidad.
Suficiente reserva de flotabilidad ira absorber fuertes inundaciones.
Armamento sofisticado para hacer blanco al primer disparo.
Moderna electrónica para detectar antes de ser detectado.
Por añadidura, el submarino ha de ser barato en su operación y modesto en su consumo de tripulaciones, dado el elevadísimo coste del adiestramiento.
A todas estas necesidades ha tratado de responder la tecnología italiana.
Veamos ahora que tal lo ha hecho.
.jpg)
Foto: El Vinci antes de su botadura. Observar la hélice, el timón de deriva, los de profundidad y el estabilizador vertical ventral.
CASCO Y PROPULSIÓN
La estructura del casco y su forma de construcción se aproximan a la utilizada en los modernos submarinos nucleares. La línea hidrodinámica es muy limpia, aunque no tanto como la configuración Tear drop adoptada en todos los submarinos nucleares y en algunos modelos convencionales (clases Zwaardvjs y Uzushio).
El casco es del tipo simple y está realizado en acero reforzado HY-80, cuya elaboración y soldado requiere una tecnología muy avanzada. La elección de un casco simple frente a uno doble permite una reducción del desplazamiento, un mejor aprovechamiento del espacio interior y reduce además los problemas de mantenimiento y corrosión.
Las pruebas de resistencia del casco han demostrado que, a profundidad máxima operacional (250 m.), experimenta un abombamiento inferior en un 50 por ciento al máximo tolerable, a lo cual contribuye no poco el pequeño número de accesos al interior del submarino.
El desplazamiento de los Sauro es de 1450 Tm. en superficie y 1640 en inmersión. En cuanto a las dimensiones, la eslora supone 63,85 m., la manga máxima 6,83 y la altura en la sección de la torreta es de 12,38.
La reserva de flotabilidad es del 11 por ciento, siendo por tanto igual a la del Tipo 209 alemán, pero inferior a la del Agosta (19 por ciento) y a la del Sjoor-men sueco (24 por ciento).
El coeficiente de seguridad a profundidad máxima es aproximadamente 2, valor que, por cierto, es bastante alto.
El conjunto propulsor está integrado por los siguientes elementos:
Tres grupos Diesel con una potencia total de 2160 KW (2872 CV) construidos por Grandi Motori Trieste (GMT). En los modernos SSK, los Diesels son utilizados para navegación en superficie y en configuración Snorkel, y usados simultáneamente para recargar las baterías.
Tres generadores Marelli, basados en baterías FAR de 296 elementos, subdivididos en dos grupos de electrodos tubulares. Estas baterías de acumuladores son las que proporcionan la energía al motor de navegación submarina.
Un motor eléctrico lento diseñado y fabricado por Marelli de 3140 KW (unos 4200 CV) de potencia. Está refrigerado por aire y su excitación es por doble inducción. Este es el motor utilizado en navegación submarina.
Toda esta maquinaria mueve una sola hélice de 7 palas de gran diámetro y giro lento. La instalación de una sola hélice tiene varias desventajas (menos maniobrabilidad, mayor vulnerabilidad), pero en cambio permite una configuración hidrodinámica superior, una mayor discreción y una construcción más sencilla.
PRESTACIONES Y CONTROL
Todo el equipo de propulsión anteriormente descrito imprime a los Sauro una velocidad punta en inmersión de 19,6 nudos (durante una hora), siendo la velocidad máxima de superficie de sólo 11 nudos (1).
(1) Tal vez agún lector no muy iniciado en la materia se habrá sorprendido con estas cifras, por lo que conviene realizar una aclaración: Hasta la década de los 50, el sumergible como indica la palabra era un buque diseñado para navegar e incluso combatir principalmente en superficie, haciendo inmersión sólo cuando la situación así lo exigiera. Esta es la razón por la que los submarinos de antes eran más rápidos y maniobrables en superficie que en inmersión y por lo que contaban con artillería. (Aparte de que la tecnología no daba para más.) Con la invención del Snorkel y los grandes progresos en la tecnología de acumuladores, el panorama cambió, pasándose entonces del concepto de sumergible al de submarino, entendiendo este último como unidad destinada a navegar casi siempre y a combatir siempre bajo las aguas. Por estas razones la hidrodinámica de los modernos SSK está mucho mejor adaptada a la navegación submarina, a la vez que a los motores eléctricos son dotados de mayor potencia que los DieseIs.
En cuanto a la autonomía, Italcantieri sostiene que es del orden de unas 12.500 millas a 4 nudos de velocidad en navegación Snorkel o de superficie. En las mismas condiciones pero a 11 nudos de velocidad aquel valor se reduce a unas 7000 millas.
La autonomía de combate, es decir, la proporcionada sólo por las baterías, es de 40 millas a 4 nudos, siendo ésta una cifra realmente respetable.
La autonomía operacional de patrulla es de 45 días. (Este valor viene dado aparte de por el combustible por las reservas de alimentos y de agua, así como por el grado de confort del buque.)
El control del buque en profundidad y dirección está encomendado a dos timones horizontales de poca profundidad y un timón vertical de deriva, instalados los tres en popa. Estos elementos son complementados por un estabilizador vertical situado a popa y dos estabilizadores horizontales instalados en la torreta.
En cuanto al sistema de tanques de lastre y trimado (que es el otro medio de controlar la profundidad y el ángulo longitudinal de navegación), poseemos pocos datos. Sin embargo, conociendo la preferencia de los proyectistas italianos por soluciones técnicas muy probadas, lo más probable es que el sistema de lastre y trimado de los Sauro sea de tipo más convencional.
Por esta razón, el compartimentado de los Sauro será, más o menos, como sigue:
Lastre: cinco compartimentos: dos a proa, dos a popa y uno central que deberán ser vaciables tanto por soplado (aire comprimido), como por medio de una bomba.
Sistema de flotabilidad: lo usual es que consista en un solo tanque situado dentro del casco de presión, cuyo llenado y vaciado se efectúa por medio de una bomba.
Sistema de trimado: suele consistir en dos o más tanques interconectados y situados a proa y popa, de forma que se pueda impulsar el agua de un extremo a otro por medio de una bomba de doble flujo.
La dotación de aire comprimido que permite operar estos sistemas es de 9750 litros almacenados en bombonas, las cuales una vez vaciadas pueden rellenarse por medio de dos compresores con una capacidad individual de 134 metros cúbicos por hora.
Fundamental para la eficacia e incluso propia supervivencia de un moderno submarino es su discreción o indetectabilidad. Este factor depende del tamaño, cota de profundidad y nivel de rumorosidad del submarino.
En cuanto a los dos primeros factores, los Sauro están más o menos al mismo nivel que cualquier otro SSK moderno, pero en lo que se refiere a su grado de emisión de ruidos parecen encontrarse en ventaja. Encontramos, en primer lugar, que todas las salas del buque están recubiertas de capas superpuestas de filamentos de lana, fibra de vidrio, aluminio y goma que impiden toda transmisión de sonidos al exterior. Asimismo, el equipo propulsor está apoyado en una serie de soportes elásticos que evitan la transmisión de vibraciones al casco. Por fin, la hélice está construida en sonestone, material que reduce las vibraciones y sonidos derivados del rozamiento al mínimo.
ARMAMENTO Y ELECTRÓNICA
El armamento de los Sauro consiste en seis tubos lanzatorpedos situados todos ellos a proa. La dotación total de torpedos es de doce (6 en los tubos y otros 6 alineados con los tubos para recarga inmediata).
El tipo de torpedo utilizado es el Whitehead Motofides A-184, eficaz contra blancos de superficie o en inmersión y lanzable desde cualquier cota. El sistema de guía del A-184 es dual, ya que simultánea o alternativamente puede ser guiado por cable desde el submarino o autodirigido por su cabeza acústica. Dispone de una espoleta de contacto y otra magnética.
La puntería de los torpedos se realiza en base a la información enviada por los sensores o por el periscopio, a través de una central de cálculo cuyo sistema de representación y elaboración de órdenes está basado en un calculador. La central de tiro cuenta con dos monitores para representar la situación táctica y los eventuales datos de tiro, si hubiera por alguna razón que recurrir al guiado manual de los torpedos.
Naturalmente, la eficaz puesta en juego del sistema de armas del submarino no implica la necesidad de equipar a éste de todos los medios de descubierta y vigilancia necesarios para descubrir a la mayor distancia posible las víctimas o, eventualmente, los verdugos del submarino.
.jpg)
foto: La botadura del Vinci permite apreciar sus reducidas dimensiones.
Para la detección de unidades de superficie o submarinos, los Sauro están dotados del sistema SISU-l diseñado por Selenia y que está integrado por un sonar pasivo y otro activo de ataque, así como el correspondiente equipo de representación y cálculo.
El sonar pasivo es de baja frecuencia y consiste en 46 hidrófonos realizados en titanato de bario, siendo utilizado este sonar para la detección y seguimiento a larga distancia. Este sistema está situado en el extremo inferior de la roda.
El sonar activo es de alta frecuencia y puede controlar cuatro ecos simultáneamente, estando integrado por un conjunto circular de hidrófonos realizados en aleación de plomo. Su misión es la determinación exacta del rumbo, velocidad y posición del blanco una vez iniciada la secuencia de ataque. Está situado en el borde superior de la proa.
Para la navegación en superficie, los Sauro cuentan con el radar SNA 3 RM2O/SM (designación Marina Militare: MM/BPS-704), cuya misión es la elaboración de datos de navegación y la vigilancia aérea y de superficie. Asimismo cuenta con diversos equipos 1FF y ECM.
GENERALIDADES
La tripulación de los Sauro se compone de 45 personas, que se distribuyen en tres turnos de guardia. La tripulación cuenta con un total de 4 lavabos: uno para oficiales, otro para suboficiales y dos más para el resto de la tripulación.
Los dormitorios se dividen en un camarote individual para el capitán, uno doble y otro cuádruple para los oficiales y por fin un gallinero para el resto de la tripulación situado en la sala de recarga de torpedos.
El nivel confort y habitabilidad del buque es de los más altos de entre las distintas unidades de la Marina Militare.
Los Sauro cuentan con un sistema de destilación de agua capaz de abastecer las necesidades de la tripulación y el buque.
Gracias al énfasis que los proyectistas pusieron en el factor seguridad, los Sauro tienen duplicados todos sus sistemas vitales. Estos submarinos cuentan asimismo con dos cabinas de escape a proa y popa con una capacidad de un hombre cada tres minutos.
Como conclusión, se puede afirmar que los Sauro son unos submarinos en los que se han sacrificado unas prestaciones espectaculares en favor de un diseño robusto, seguro y barato. Es conveniente así señalar que los SSK que muestran ciertas ventajas sobre los Sauro los Zwaardvis holandeses y los Uzushio japoneses tienen una tecnología y unos costes mucho más parecidos a los de un submarino nuclear que a los de uno convencional.
FICHA TECNICA:
Desplazamiento: 1450 Tm. en superficie y 1630 en inmersión.
Dimensiones: eslora-63,8 m.; manga-6,8; calado-5 ,5.
Armamento: 6. T.lt. de 533 mm.; 12 torpedos A-184 o similar.
Propulsión: tres Diesels GMT de 2872 CV; tres generadores; un motor eléctrico Marelli de 4200 CV; una hélice de 7 palas. Velocidad: máxima superficie: 11 nudos; máxima inmersión: 20 nudos; máxima inmersión por una hora: 19,6 nudos.
Autonomía: Snorkel/Superficie: 12500 millas a 4 nudos; Snorkel/Superfie: 7000 millas a 11 nudos; inmersión: 400 millas a 4 nudos.
Profundidad máxima operacional: 250 m. emergencia: 490 m.
Autonomía operacional: 45 días.
Tripulación: 45.
Electrónica: sistema SISU-l; FCM; 1FF .
