



La compañía española Escribano Mechanical & Engineering se adjudicó un contrato de la Subdirección General de Adquisiciones de Armamento y Material de la DGAM para el desarrollo de un sistema autónomo de enjambre distribuido y multiplataforma para misiones ISTAR, denominado SENDISTAR. El contrato, valorado en 100.000 euros, se completará previsiblemente en octubre del próximo año y contempla un desarrollo cuyas características adelantamos a comienzos del pasado mes de noviembre. Entonces Escribano adelantó su trabajo en un desarrollo de un sistema del tipo ISTAR (Intelligence, Surveillance, Target Adquisition and Reconnaissance o Inteligencia, Vigilancia, Reconocimiento y Designación de Objetivos), basado en el uso de enjambres de drones (swarm) que podría ser desplegadas de plataformas del Ejército de Tierra como el futuro 8x8 Dragón, desde el que tendrían un alcance de 5 a 10 km. y que podrían incorporar capacidad loitering o de ataque contra objetivos en tierra.
SENDISTAR
Las siglas SENDISTAR se refieren a Sistema autónomo de Enjambre Distribuido y multiplataforma para misiones ISTAR y se enmarca en la Fase II del programa RAPAZ de la DGAM, promovido por la Subdirección General de Planificación, Tecnología e Innovación (SGD-PLATIN).
Contempla el desarrollo del software de un sistema experimental de enjambre de vehículos autónomos aéreos (Unmanned Aircraft System o UAS), para realizar diferentes tipos de misiones experimentales, principalmente ISTAR, SAR (Search and Rescue) y loitering (merodear a la espera de blancos de oportunidad). El software también se instalará en el sistema de UAVs ATHENEA. El enjambre es operado por un único operador y su comportamiento será autónomo y podrá adaptarse a los eventos de la misión, teniendo capacidad de análisis embarcado de la carga de pago en cada elemento del enjambre. El objetivo del sistema es la reducción de los riesgos relacionados al desarrollo de enjambres de vehículos autónomos aéreos, integrando nuevas capacidades en UAS existentes.
Este proyecto pretende desarrollar un sistema experimental de enjambre multiplataforma (UAV, USV, UGV) que operen como un único para realizar misiones experimentales. El enjambre podrá ser operado por un único operador, gracias a la inteligencia del sistema para adaptarse autónomamente según los eventos de la misión. El objetivo será utilizar dicho sistema para realizar pruebas con unidades operativas una vez completado el proyecto, y potencialmente continuar el desarrollo del sistema con los inputs obtenidos en dichas maniobras.
El sistema contará con 7 capacidades básicas para cualquier misión en enjambre como son la capacidad multiplataforma (permitir usar el sistema de enjambre con diferentes tipos de plataformas no tripuladas, ya sean UAVs de ala fija, multicópteros o VTOL así como UGV y USV), módulo de misiones (capacidad de poder añadir diferentes tipos de planificadores de manera rápida), sistema de comunicaciones dinámica (permite optimizar el ancho de banda de la red de comunicaciones, así como la entrada de nuevos elementos a la red), evitador de colisiones (evitar colisiones entre los elementos del enjambre de manera colaborativa, predictiva y reactiva, capa deliberativa (capacidad de tomar decisiones de manera no jerárquica y distribuida), capa de seguridad (capacidad de detectar comportamientos anómalos del sistema y tomar decisiones al respecto desde un punto de vista de safety, cooperación tripulado - no tripulado (MUM-T o capacidad de cooperar con vehículos tripulados).
.jpg) Una tecnología pionera en Europa con múltiples aplicaciones
Una tecnología pionera en Europa con múltiples aplicaciones
Se trata de una tecnología pionera por su desarrollo en la Unión Europa, que permitirá realizar varias misiones coordinadas de forma simultánea, dependiente de las necesidades. Siempre comportándose como un único sistema, ampliando el área de misión e integrando diferentes cargas de pago y aumentando la seguridad, robustez y funcionalidad del sistema.
La tecnología desarrollada por Escribano proporciona inteligencia al propio enjambre de drones (u otros sistemas aéreos no tripulados como UAV, por ejemplo), que decide por sí mismo cuáles son las mejores decisiones a tomar (a nivel grupal o individual) en todo momento para cumplir la misión encomendada. La diferencia respecto a otros desarrollos es que con este software los drones son autónomos e inteligentes por ellos mismos y no necesitan que los dirija un ser humano en todo momento.
Esta tecnología tiene múltiples aplicaciones tanto militares como civiles como las misiones de defensa y protección de los soldados, la vigilancia costera, el control de vertidos tóxicos, la monitorización de Incendios, la búsqueda de supervivientes en catástrofes como terremotos, la detección de plagas en las cosechas agrícolas o el transporte de mercancías.
Experiencia con UAVs
Escribano Mechanical & Engineering cuenta con un departamento de RPAS-Swarming que lleva trabajando en estas tecnologías desde 2016, habiendo participado en proyectos relacionados con enjambre y MUM-T, integraciones con el sistema de misión FITS o Fully Integrated Tactic System junto a Airbus y enjambre de RPAS y loiter ammunitions para misiones ISTAR+ataque, de la propia Escribano Mechanical & Engineering.
La compañía tiene un desarrollo propio denominado LISS por Long Range Intelligence Security System o Sistema de Seguridad Inteligente de Largo Alcance que permite dirigir misiones de un enjambre de UAVs de forma coordinada, que incluye algunas de las características analizadas como funcionamiento no jerárquico, capacidad de decisión autónoma tanto a nivel individual o grupal diseñado para misiones de tipo ISTAR y con capacidad de ataque loitering.
Desde un punto de vista técnico los principales hitos del departamento han sido la realización de vuelos de un enjambre compuesto por 15 RPAS operados por un solo operador, vuelos de una enjambre con 6 cargas de pago, la integración con red de mando y control, más de 200 horas de vuelo en enjambre o el desarrollo de múltiples cargas de pago y RPAS. (José Mª Navarro García)
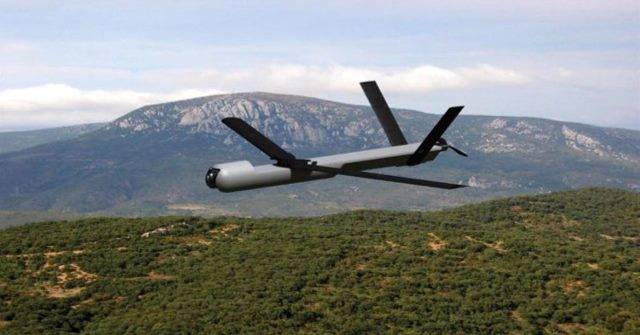
Fotografía: Escribano desarrollará una solución de tipo enjambre para el Ministerio de Defensa (Escribano Mechanical & Engineering)
-La imagen corporativa del programa LISS (Escribano Mechanical & Engineering)
